|
I am a Research Fellow working with Maneesh Sahani at the Gatsby Unit, UCL. Previously, I worked as a postdoctoral researcher at the Zuckerman Mind Brain Behavior Institute, Columbia University with Daniel Wolpert. I received a PhD in Engineering from the University of Cambridge, where I trained in the Computational and Biological Learning Lab under the supervision of Daniel Wolpert (primary supervisor) and Máté Lengyel (secondary advisor). Prior to my PhD, I worked as a medical doctor in the NHS, and before that, I received an MSc in Cognitive and Computational Neuroscience from The University of Sheffield and an MBChB in Medicine from The University of Manchester. Email / Google Scholar / GitHub / LinkedIn / Twitter |

|
|
I am interested in replicating human dexterity using methods from probabilistic machine learning and reinforcement learning, with an emphasis on unsupervised reinforcement learning. I am an active contributor to MyoSuite, participating in biweekly development meetings. Working collaboratively and independently, I have:
Outstanding research achievements are highlighted below. |
|
|
|
Our team came 🥇 first place 🥇 in the NeurIPS 2024 MyoChallenge Manipulation Track, winning a $2,000 prize for advancing high-dimensional control in overactuated systems. The challenge involved transferring objects between pillars by coordinating a biologically-realistic arm with 63 muscles and a robotic prosthetic arm with 17 DoFs. On each episode, object properties and pillar locations were randomized to further increase task difficulty. To control the musculoskeletal arm, I developed a novel algorithm to learn low-dimensional control manifolds in high-dimensional action spaces. This allowed us to efficiently acquire dexterous reaching and grasping skills. To control the robotic prosthetic arm, we combined a learned policy with inverse kinematic control, enabling smooth hand-offs and object relocation. Curriculum learning and reward shaping were used to solve the task in stages (reach, grasp, handover, move object to goal) . |
Our winning solution, showcasing robustness to random pillar locations and object properties (weight, size and friction). 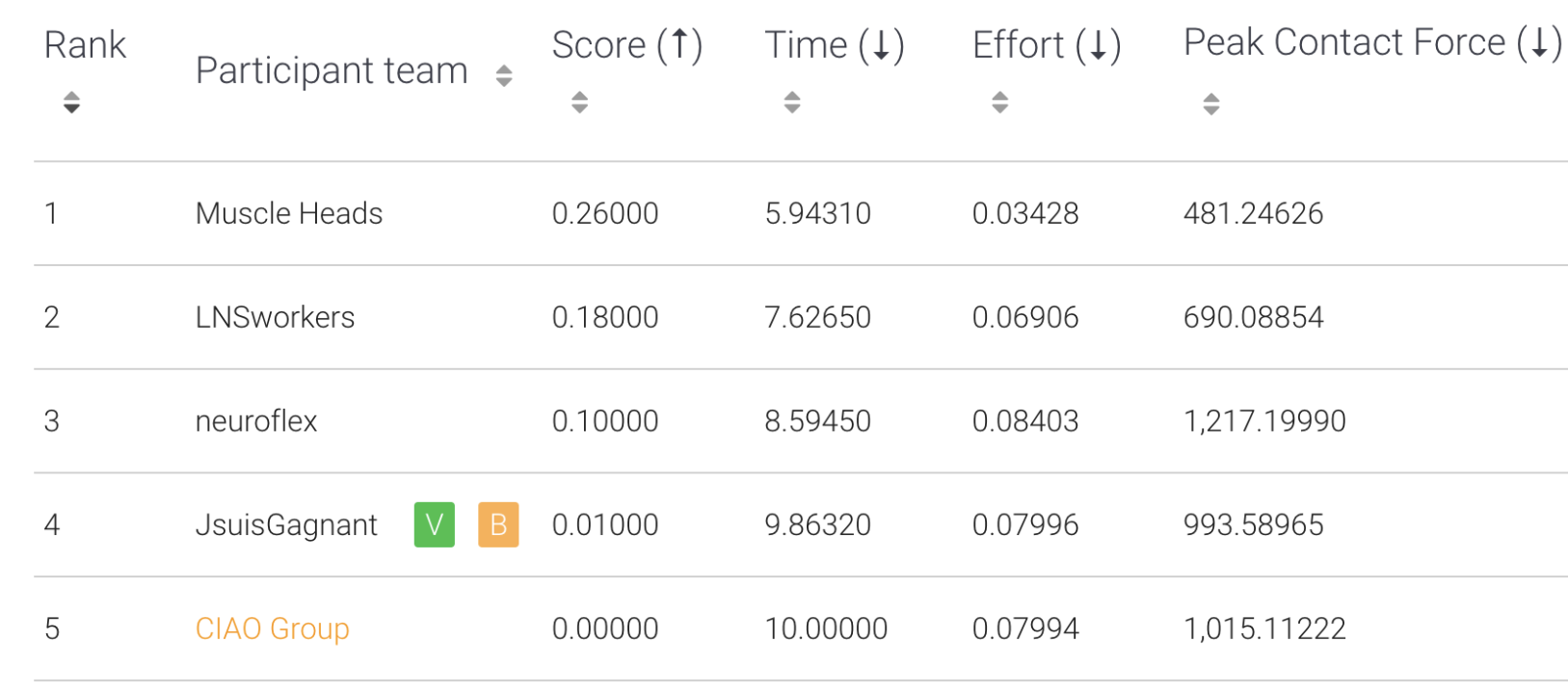
Our solution ranked first on all metrics: score, time, effort and peak contact force. |
|
|
|
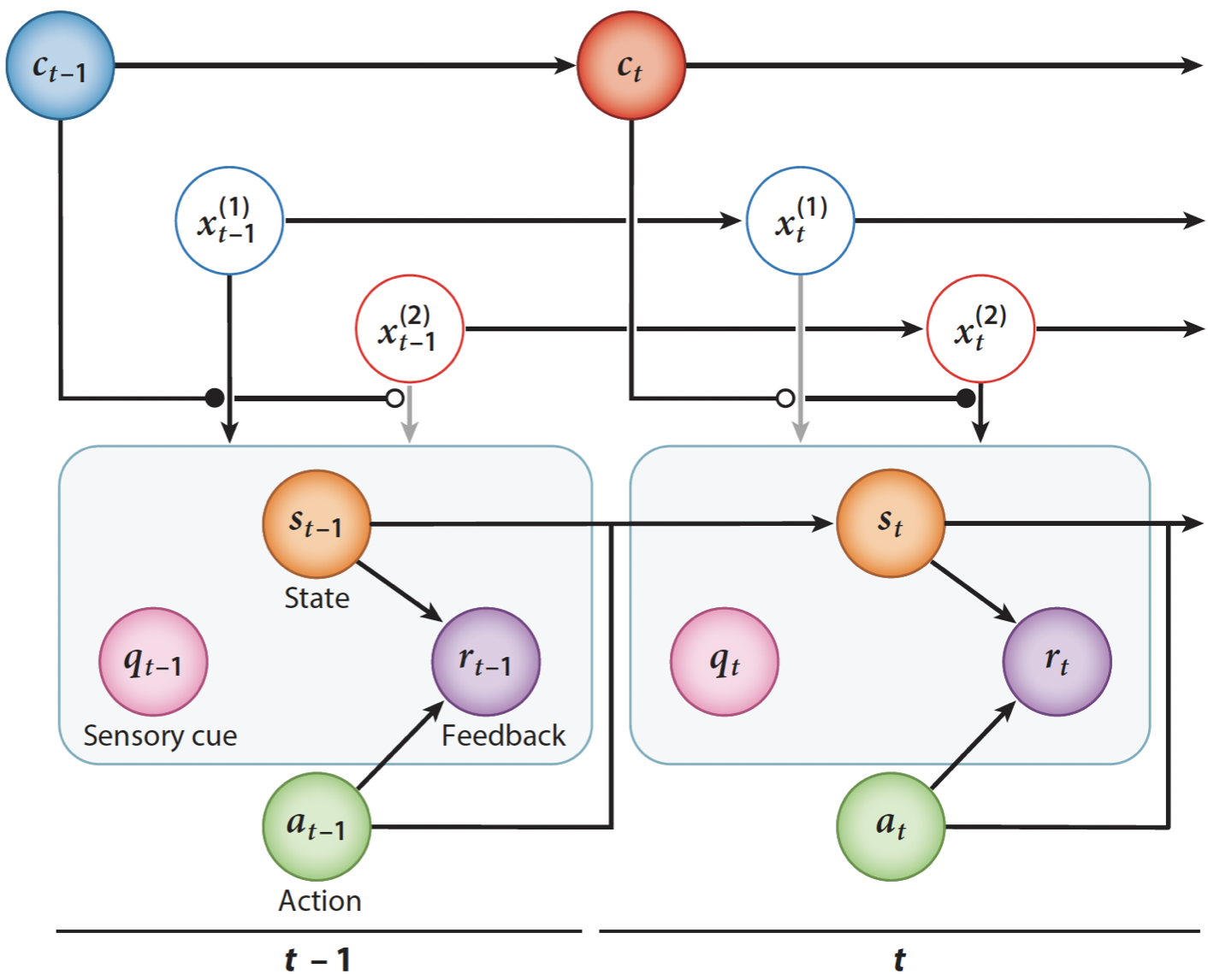
James Heald, Daniel Wolpert*, Máté Lengyel* Annual Review of Neuroscience, 2023 We review a theoretical approach to formalizing context-dependent learning in the face of contextual uncertainty and the core computations it requires. We show how this approach organizes a large body of disparate experimental observations, from multiple levels of brain organization (including cells, circuits, systems and behavior) and multiple brain regions (most prominently the prefrontal cortex, the hippocampus and motor cortices), into a coherent framework. We argue that contextual inference may also be key to understanding continual learning in the brain. |
|
James Heald, Máté Lengyel*, Daniel Wolpert* Trends in Cognitive Sciences, 2023 (Feature Review and Issue Cover) PDF / Issue Cover In this issue of Trends in Cognitive Sciences, we review a computational framework of repertoire learning that provides a unifying account of phenomena across numerous domains, including conditioning, episodic memory, economic decision making and motor learning. |
|
James Heald, Máté Lengyel*, Daniel Wolpert* Nature, 2021 (accompanied by News and Views) PDF / Code / Data / New and Views We develop a theory of motor learning based on the principle of contextual inference. Our theory reveals that adaptation can arise by both creating and updating memories and changing how existing memories are differentially expressed. |
|
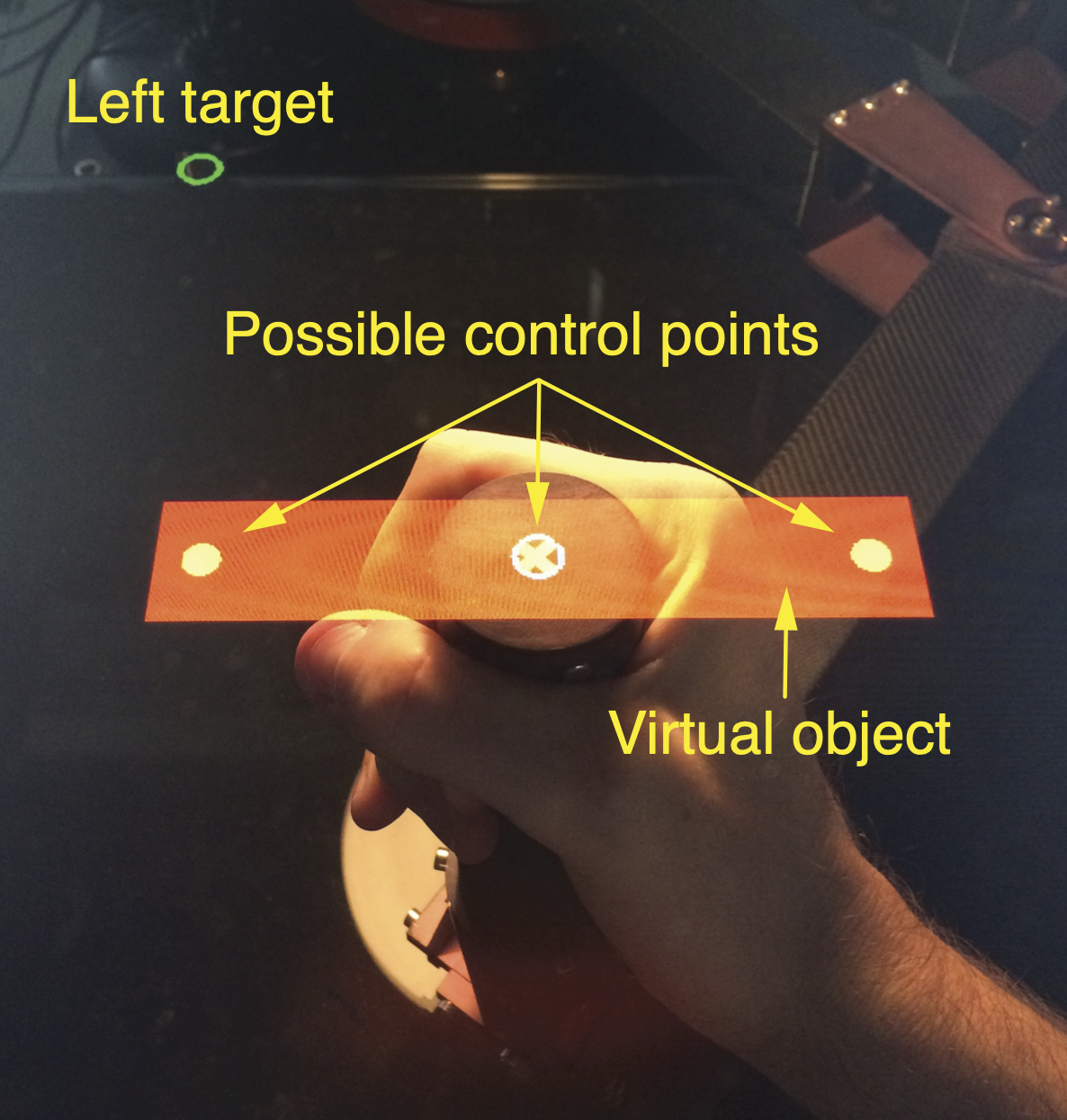
James Heald, James Ingram, J. Randall Flanagan, Daniel Wolpert Nature Human Behaviour, 2018 PDF / Code Different parts of tools are often handled in different ways. This study presents a computational model explaining how humans build separate motor memories for different parts of the same object. |
|
|